Example 04: Autonomous Vehicle Fleet¶
Multi-agent cooperative trajectory prediction on complex road networks. 64 vehicles across 4 traffic zones on highways, roundabouts, intersections, and ramps — with isolated, ring, and dense topologies compared.
Source: examples/04_autonomous_vehicle_fleet.py
Results¶
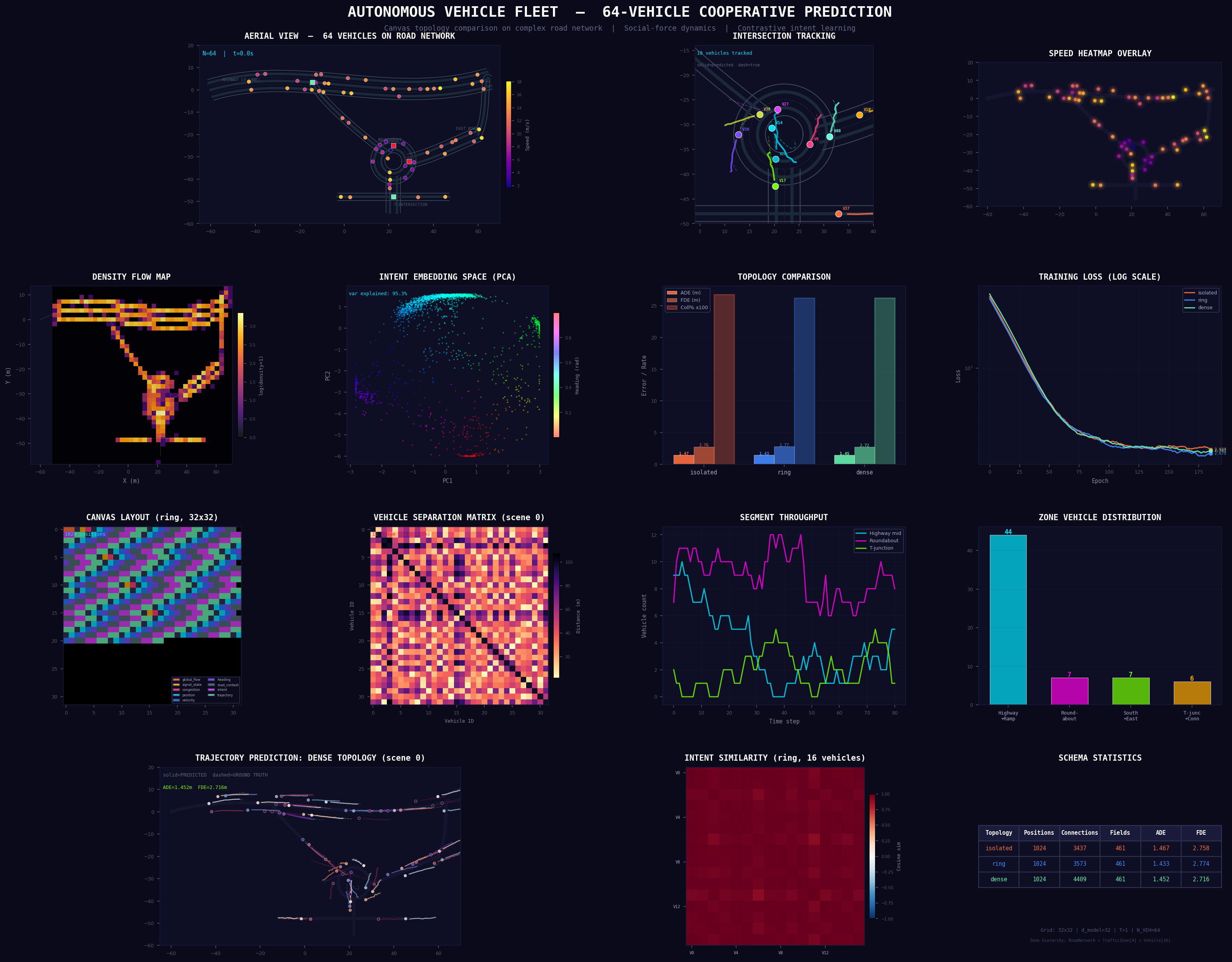
16-panel figure: Road network geometry, per-zone trajectory plots, speed heatmaps, topology comparison metrics (ADE, FDE, collision rate), attention masks, canvas layout visualization, and training curves.
Animation: 64 vehicles moving through the road network with glowing trails and speed-mapped colors.
Type hierarchy¶
@dataclass
class Vehicle:
position: Field = Field(1, 1)
velocity: Field = Field(1, 1)
heading: Field = Field(1, 1)
road_context: Field = Field(1, 2, is_output=False)
intent: Field = Field(1, 2)
trajectory: Field = Field(1, 2, loss_weight=4.0)
@dataclass
class TrafficZone:
signal_state: Field = Field(1, 1, is_output=False)
congestion: Field = Field(1, 1, loss_weight=2.0)
vehicles: list # 16 vehicles per zone
@dataclass
class RoadNetwork:
global_flow: Field = Field(1, 2)
zones: list # 4 zones
Connectivity¶
Three topology variants compared on the same data:
# Isolated — no inter-vehicle attention
bound_isolated = make_schema(ConnectivityPolicy(
intra="dense", parent_child="hub_spoke",
array_element="isolated", temporal="dense"))
# Ring — each vehicle attends to neighbors only
bound_ring = make_schema(ConnectivityPolicy(
intra="dense", parent_child="hub_spoke",
array_element="ring", temporal="dense"))
# Dense — full all-pairs attention
bound_dense = make_schema(ConnectivityPolicy(
intra="dense", parent_child="hub_spoke",
array_element="dense", temporal="dense"))
Canvas: 25×24 = 600 positions. Isolated: 3,873 connections. Ring: 8,513. Dense: 38,481.
Key metrics¶
| Topology | ADE | FDE | Collision Rate |
|---|---|---|---|
| Isolated | 1.32 | 2.75 | 23.8% |
| Ring | 2.72 | 4.82 | 32.3% |
| Dense | 4.57 | 7.73 | 92.0% |