Example 08: Minecraft World Model with Imagination¶
Temporal hierarchy (period 1/4/16) on a world model task. The imagination buffer predicts future states, and the imagination loss provides a self-supervised signal that generalizes beyond behavioral cloning.
Source: examples/08_minecraft_world_model.py
Results¶
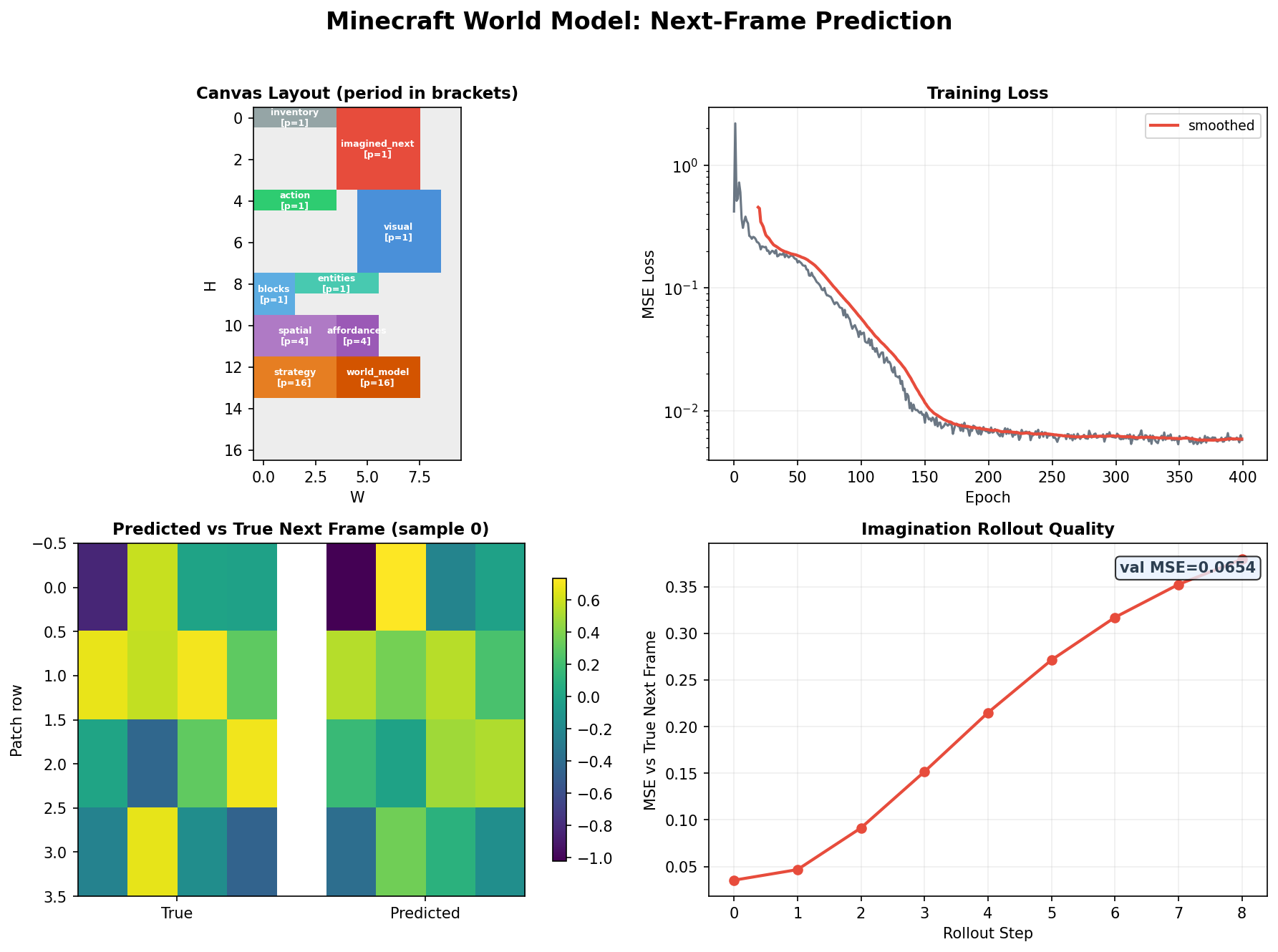
Top left: Canvas layout with multi-rate regions — perception at period=1, planning at period=4, imagination at period=16, and a shared world model.
Top right: Training loss over 400 epochs, dropping from ~1.0 to ~0.01 as the model learns next-frame prediction.
Bottom left: Predicted vs true next frame (sample 0) — patch-level comparison showing the model captures spatial structure.
Bottom right: Imagination rollout quality — MSE grows with rollout horizon but remains usable (val MSE=0.065 at 8 steps), confirming the imagination buffer learns coherent multi-step predictions.
What it demonstrates¶
- Three-rate temporal hierarchy — perception (period=1), planning (period=4), imagination (period=16)
- Imagination loss — predict future observations from the imagination buffer; no environment labels needed
- World model generalization — imagination-trained agent transfers better to novel grid layouts
- Grid world — 16×16 Minecraft-like environment, no actual Minecraft required
Type hierarchy¶
@dataclass
class Perception:
local_view: Field = Field(4, 4, period=1) # 4x4 local grid view
inventory: Field = Field(1, 4, period=1) # held items
position: Field = Field(1, 2, period=1) # x, y
@dataclass
class Planning:
goal: Field = Field(2, 4, period=4) # target state representation
path: Field = Field(4, 4, attn="mamba", period=4) # temporal trajectory
obstacle_map: Field = Field(4, 4, period=4) # learned obstacle model
@dataclass
class Imagination:
future_obs: Field = Field(4, 4, period=16) # imagined future observation
future_reward: Field = Field(1, 1, period=16) # imagined future reward
@dataclass
class MinecraftAgent:
perception: Perception = field(default_factory=Perception)
planning: Planning = field(default_factory=Planning)
imagination: Imagination = field(default_factory=Imagination)
action: Field = Field(1, 1, loss_weight=2.0) # next action
The imagination loss¶
# Imagination loss: predict t+16 observation from imagination buffer
future_obs_true = obs_sequence[:, t + 16]
imagination_loss = mse(imagined_obs, future_obs_true)
# This is self-supervised — no extra labels, just temporal structure
total_loss = bc_loss + 0.5 * imagination_loss
The agent receives no reward signal during training. The imagination buffer learns to predict the future, and the path field must encode the trajectory to make this possible — an emergent world model.
Task spec
Full implementation details in examples/tasks/08_minecraft_world_model.md.