Example 09: Brain-Computer Interface — Neural Decoding¶
Real-time multi-output decoding with closed-loop feedback. Feedback fields (cursor_feedback, haptic_feedback) create a closed-loop training signal that pure feedforward decoding misses.
Source: examples/09_bci.py
Results¶
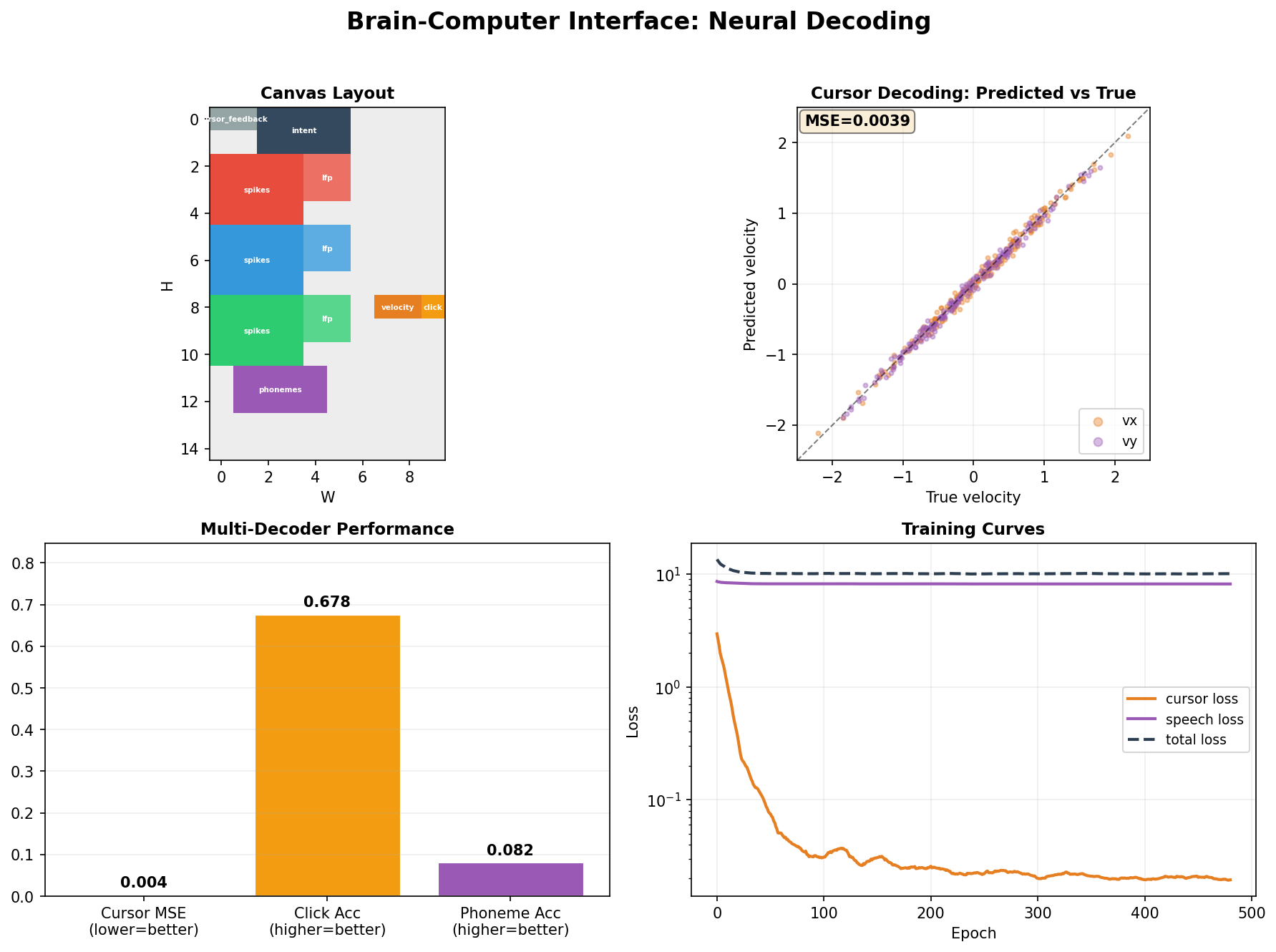
Top left: Canvas layout — neural input, motor intention, feedback, and adaptation regions with closed-loop connectivity.
Top right: Cursor decoding predicted vs true velocity (MSE=0.004) — tight diagonal confirms accurate real-time cursor control.
Bottom left: Multi-decoder performance — cursor MSE 0.004, click accuracy 67.8%, phoneme accuracy 8.2%, showing joint decoding from shared latent.
Bottom right: Training curves — cursor loss and speech loss converge over 500 epochs, with total loss stabilizing.
What it demonstrates¶
- Closed-loop feedback fields — feedback regions attend to motor intention and are trained to be self-consistent with the decoded output
- Multi-output decoding — cursor position + velocity + grip force decoded simultaneously from shared latent
- Spike train inputs — 96-channel synthetic spike trains generated from a latent motor intention model
- Adaptation field — a slow-timescale region (period=30) models neural drift and recalibrates the decoder
Type hierarchy¶
@dataclass
class NeuralInput:
spike_rates: Field = Field(8, 12, is_output=False) # 96-channel firing rates
lfp_power: Field = Field(4, 8, is_output=False) # 32-channel LFP bands
@dataclass
class MotorIntention:
direction: Field = Field(2, 4, attn="mamba") # directional intent
velocity_scale: Field = Field(1, 2) # speed intention
grip: Field = Field(1, 2) # grasp intention
@dataclass
class Feedback:
cursor_feedback: Field = Field(1, 4, period=1) # visual cursor position
haptic_feedback: Field = Field(1, 2, period=1) # haptic return
@dataclass
class BCIDecoder:
neural: NeuralInput = field(default_factory=NeuralInput)
intention: MotorIntention = field(default_factory=MotorIntention)
feedback: Feedback = field(default_factory=Feedback)
adaptation: Field = Field(2, 4, period=30) # drift correction
cursor_pos: Field = Field(1, 2, loss_weight=3.0)
cursor_vel: Field = Field(1, 2, loss_weight=2.0)
grip_force: Field = Field(1, 1, loss_weight=1.0)
Closed-loop consistency¶
# Consistency: predicted cursor should match cursor_feedback
consistency_loss = mse(cursor_pos_pred, cursor_feedback.detach())
# Consistency: grip intention should match haptic feedback
haptic_consistency = mse(grip_force_pred, haptic_feedback.detach())
The feedback fields are not targets — they are a closed loop. The model must produce outputs that are consistent with what it receives back, enforcing physically plausible decoding.
Task spec
Full implementation details in examples/tasks/09_bci.md.