Environment Extraction¶
Extract Gymnasium RL environments from trained world models.
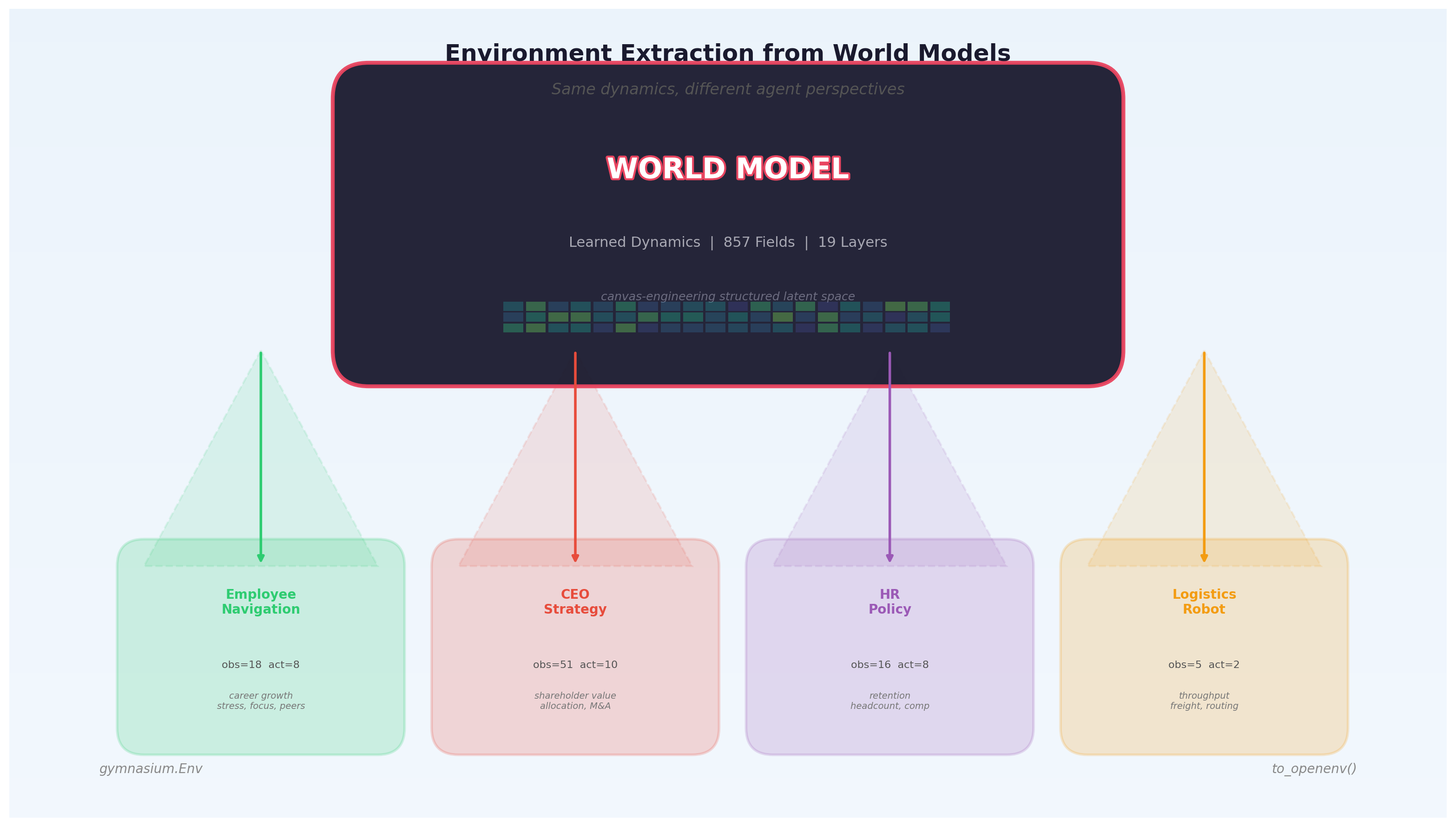
A trained WorldModel captures dynamics across all its fields. to_openenv() carves out agent perspectives — selecting which fields the agent sees, which it controls, and how reward is computed. The same world model yields many different environments, each with its own reward landscape but sharing the same learned dynamics.
Why this matters¶
Training a world model is expensive — it requires learning the causal dynamics of hundreds of fields across multiple domains. But once trained, that dynamics model becomes a reusable simulator. You can:
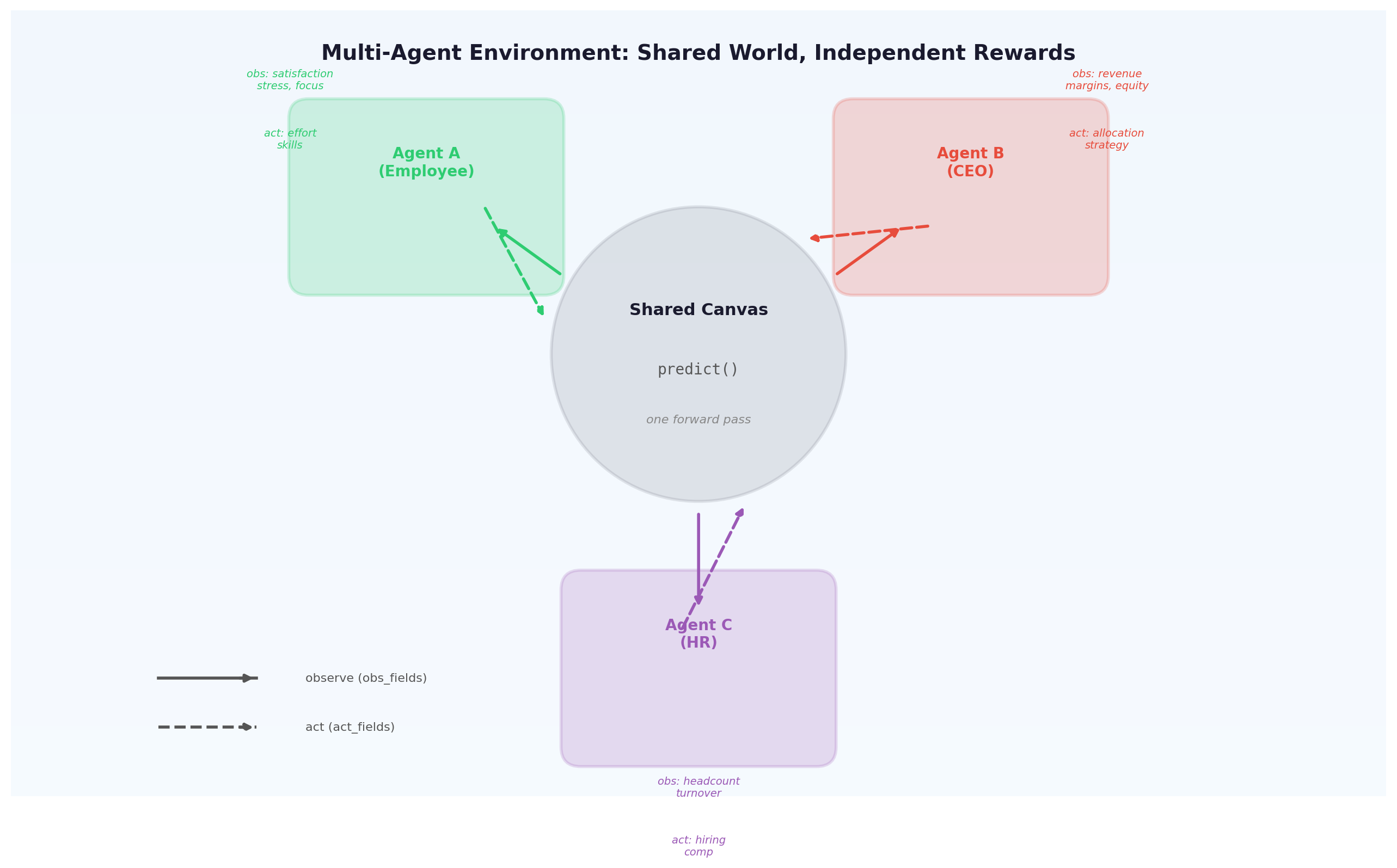
- Distill dynamics into agents: Train different RL agents for different roles (employee, CEO, HR director) in the same corporate world
- Vary morphology: Give different robots different sensors and actuators over the same physical dynamics
- Multi-agent training: All agents share one
predict()call — their actions jointly shape the next state - Transfer learning: An agent trained in one perspective can be evaluated in another
Quick start¶
from general_unified_world_model import GeneralUnifiedWorldModel
# 1. Build and train a world model
model = GeneralUnifiedWorldModel(
include=["financial", "regime", "sector_tech"],
entities={"firm_acme": Business()},
)
model.finetune(my_data, n_steps=5000)
# 2. Extract an environment
env = model.to_openenv(
obs_fields=["firm_acme.financials.revenue", "regime.growth_regime"],
act_fields=["firm_acme.strategy.capital_allocation"],
reward_fn=lambda obs, act, info: obs["firm_acme.financials.revenue"].mean(),
)
# 3. Standard Gymnasium loop
obs, info = env.reset()
for step in range(100):
action = my_agent.act(obs)
obs, reward, terminated, truncated, info = env.step(action)
How it works¶
sequenceDiagram
participant Agent
participant Env as WorldModelEnv
participant WM as WorldModel
participant Canvas
Agent->>Env: env.step(action)
Env->>Canvas: Write action to act_fields
Env->>WM: predict(n_denoise_steps)
WM->>Canvas: Diffusion → next state
Canvas->>Env: Read obs_fields
Env->>Env: reward_fn(obs, action, info)
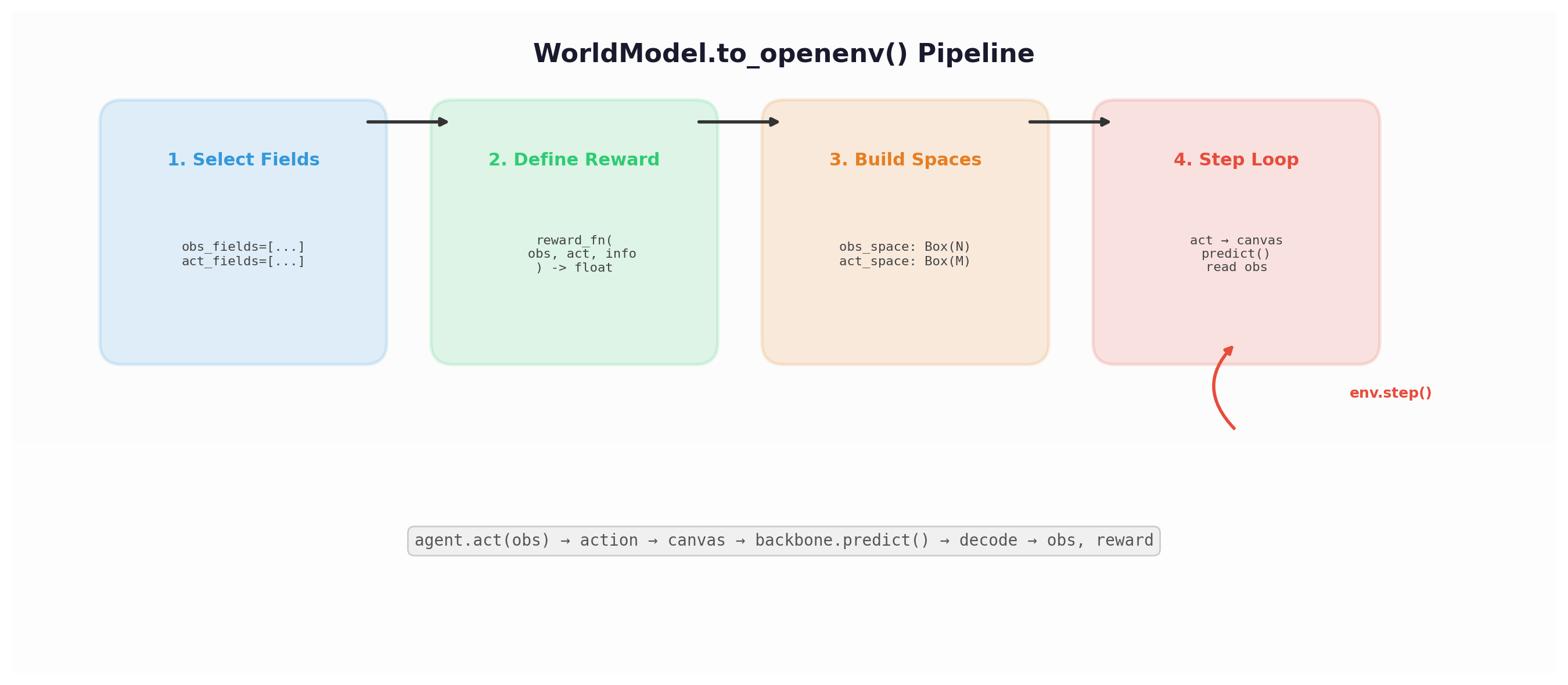
Env-->>Agent: obs, reward, terminated, truncated, infoAt each step:
- Actions → Canvas: Agent's action vector is split into per-field values and encoded onto the canvas at
act_fieldspositions - Predict: The world model runs diffusion inference, advancing the entire canvas state forward
- Canvas → Observations: The agent's
obs_fieldsare decoded from the predicted canvas - Reward: The
reward_fnscores the new observation
Same dynamics, different rewards¶
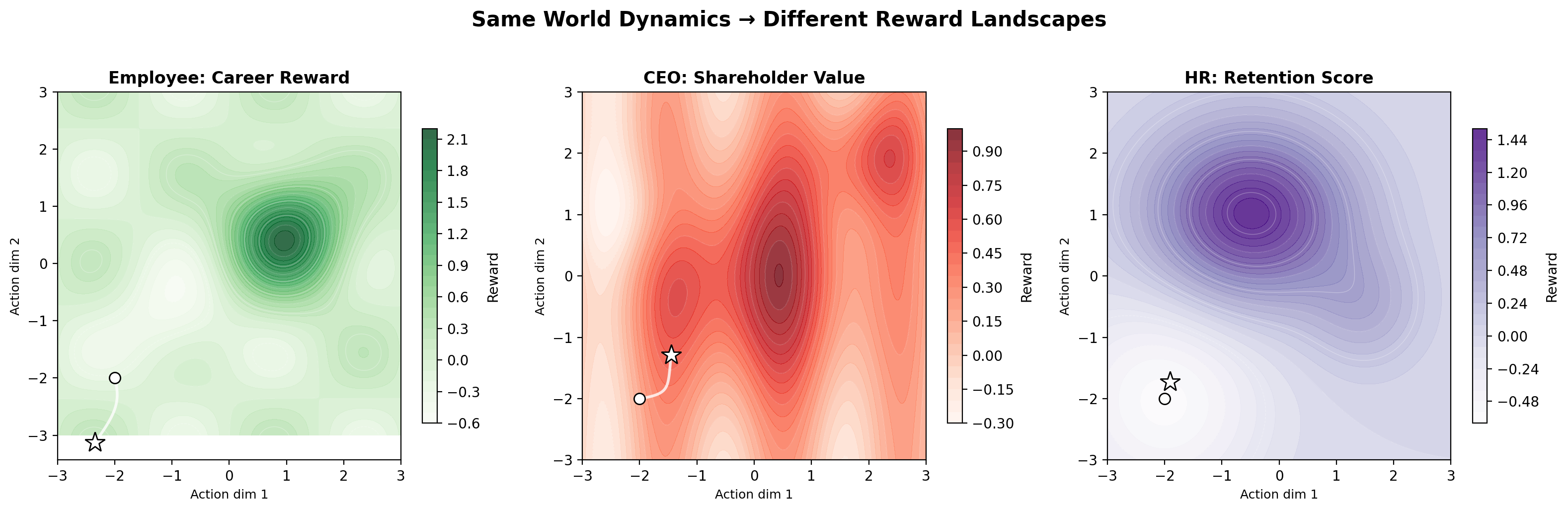
The key insight: the same dynamics produce different reward landscapes depending on which fields you observe and how you define success. An employee navigating a corporation and a CEO managing it experience the same organizational dynamics but face completely different optimization problems.
API Reference¶
WorldModel.to_openenv()¶
env = model.to_openenv(
obs_fields=["field.path.a", "field.path.b"],
act_fields=["field.path.c"],
reward_fn=my_reward_fn,
terminated_fn=None, # Optional: (obs_dict, step, info) -> bool
max_steps=200, # Truncation limit
n_denoise_steps=10, # Speed vs quality tradeoff
act_low=-1.0, # Action space bounds
act_high=1.0,
initial_obs_fn=None, # Set initial canvas state on reset
render_mode=None, # "human" or "rgb_array"
)
| Parameter | Type | Description |
|---|---|---|
obs_fields |
list[str] |
Field paths the agent observes |
act_fields |
list[str] |
Field paths the agent controls |
reward_fn |
Callable |
(obs_dict, action, info) -> float |
terminated_fn |
Callable \| None |
(obs_dict, step, info) -> bool |
max_steps |
int |
Episode length before truncation |
n_denoise_steps |
int |
Diffusion steps per predict (lower = faster) |
act_low, act_high |
float |
Continuous action bounds |
initial_obs_fn |
Callable \| None |
Returns dict of initial observations |
render_mode |
str \| None |
"human" (text), "rgb_array" (image), or None |
Returns: WorldModelEnv (a gymnasium.Env subclass)
WorldModel.to_multi_openenv()¶
from general_unified_world_model import AgentSpec
multi = model.to_multi_openenv(
agents={
"employee": AgentSpec(
obs_fields=[...], act_fields=[...], reward_fn=employee_reward,
),
"ceo": AgentSpec(
obs_fields=[...], act_fields=[...], reward_fn=ceo_reward,
),
},
max_steps=200,
n_denoise_steps=10,
)
All agents act simultaneously. A single predict() advances the shared world. Returns per-agent dicts for observations, rewards, termination, and info.
AgentSpec¶
| Parameter | Type | Description |
|---|---|---|
obs_fields |
list[str] |
This agent's observation fields |
act_fields |
list[str] |
This agent's action fields |
reward_fn |
Callable |
This agent's reward function |
terminated_fn |
Callable \| None |
This agent's termination condition |
act_low, act_high |
float |
This agent's action bounds |
WorldModelEnv¶
Standard gymnasium.Env:
| Method | Signature | Description |
|---|---|---|
reset() |
-> (obs, info) |
Clear canvas, return initial observation |
step(action) |
-> (obs, reward, terminated, truncated, info) |
Execute one step |
render() |
-> None \| ndarray |
Visualize current state |
close() |
-> None |
Clean up |
The info dict contains:
step: Current step numberobs_dict: Named observation values (field_path → numpy array)predictions: All field predictions (not just obs_fields)
Animations¶
Example: Corporate multi-agent¶
Build a corporate world model and extract three agent perspectives:
from general_unified_world_model import GeneralUnifiedWorldModel, AgentSpec
from general_unified_world_model.schema.business import Business
from general_unified_world_model.schema.individual import Individual
# Shared world model
model = GeneralUnifiedWorldModel(
include=["regime", "financial.equities", "sector_tech"],
entities={
"firm_acme": Business(),
"person_ceo": Individual(),
"person_employee": Individual(),
},
)
# Employee: maximize career growth
employee_env = model.to_openenv(
obs_fields=[
"firm_acme.operations.employee_satisfaction",
"person_employee.state.stress",
"person_employee.state.confidence",
"person_employee.incentives.career_incentives",
],
act_fields=[
"person_employee.state.current_focus",
"person_employee.cognitive.risk_appetite",
],
reward_fn=lambda obs, act, info: (
obs["person_employee.state.confidence"].mean()
- 0.5 * obs["person_employee.state.stress"].mean()
),
)
# CEO: maximize shareholder value
ceo_env = model.to_openenv(
obs_fields=[
"firm_acme.financials.revenue_growth",
"firm_acme.financials.operating_margin",
"firm_acme.market.equity_price",
"firm_acme.latent_health",
"regime.growth_regime",
],
act_fields=[
"firm_acme.strategy.capital_allocation",
"firm_acme.strategy.capex_plan",
],
reward_fn=lambda obs, act, info: (
obs["firm_acme.financials.revenue_growth"].mean()
+ 0.3 * obs["firm_acme.market.equity_price"].mean()
),
)
# Multi-agent: all act simultaneously
multi = model.to_multi_openenv(
agents={
"employee": AgentSpec(
obs_fields=["firm_acme.operations.employee_satisfaction",
"person_employee.state.stress"],
act_fields=["person_employee.state.current_focus"],
reward_fn=lambda obs, act, info: obs.get(
"firm_acme.operations.employee_satisfaction", [0])[0],
),
"ceo": AgentSpec(
obs_fields=["firm_acme.financials.revenue_growth",
"firm_acme.market.equity_price"],
act_fields=["firm_acme.strategy.capital_allocation"],
reward_fn=lambda obs, act, info: obs.get(
"firm_acme.financials.revenue_growth", [0])[0],
),
},
)
obs = multi.reset()
actions = {name: multi.action_spaces[name].sample() for name in multi.agents}
obs, rewards, terms, truncs, infos = multi.step(actions)
Full source: examples/08_corporate_envs.py
Example: Robot morphologies¶
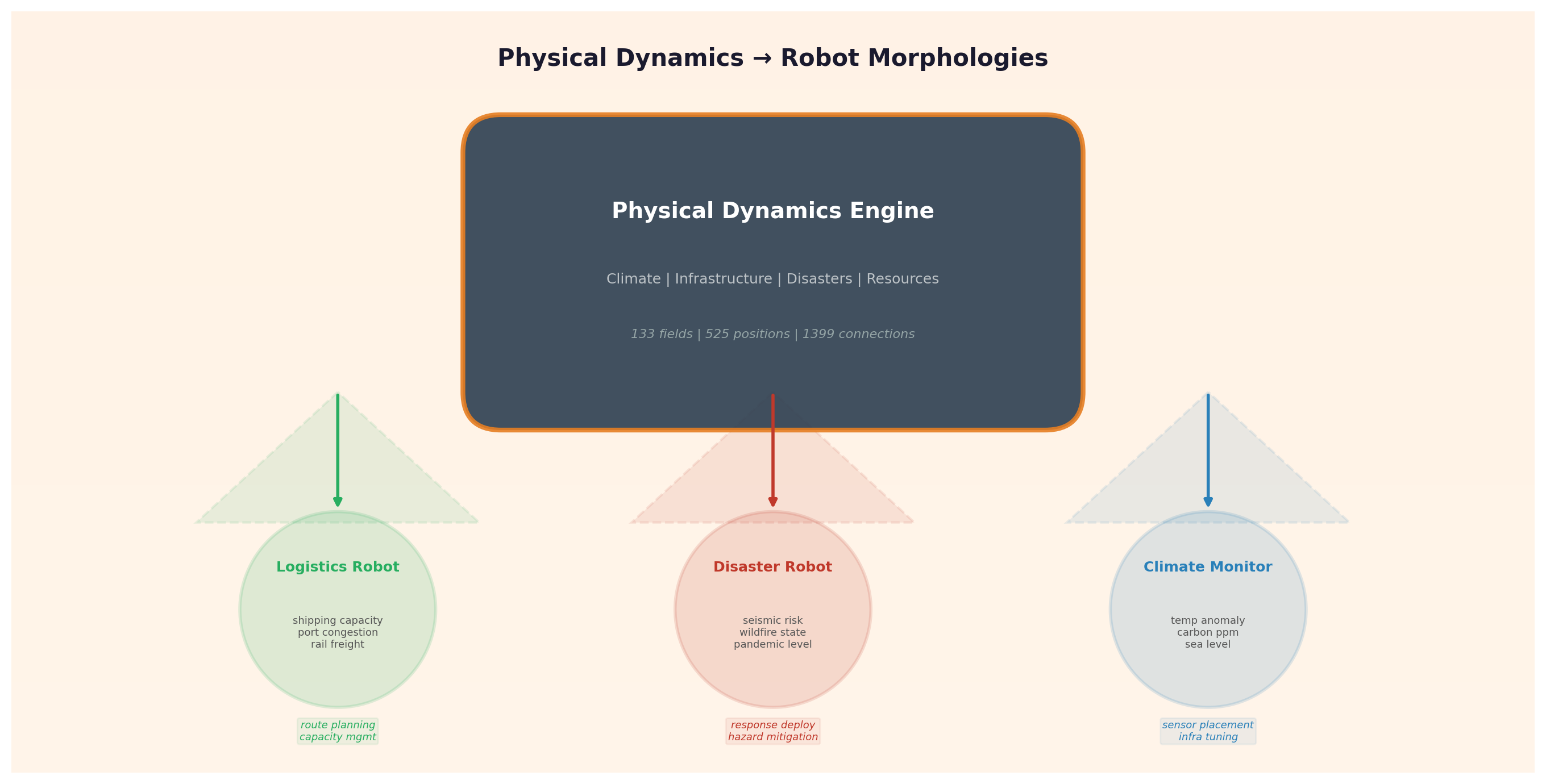
Different robots, same physics:
model = GeneralUnifiedWorldModel(
include=["physical", "resources", "infrastructure", "regime"],
)
# Logistics robot: freight optimization
logistics_env = model.to_openenv(
obs_fields=[
"physical.infrastructure.shipping_lane_capacity",
"physical.infrastructure.port_congestion",
"physical.infrastructure.rail_freight_network",
],
act_fields=[
"physical.infrastructure.shipping_lane_capacity",
],
reward_fn=lambda obs, act, info: (
obs["physical.infrastructure.shipping_lane_capacity"].mean()
- 0.8 * obs["physical.infrastructure.port_congestion"].mean()
),
)
# Disaster response robot: hazard mitigation
disaster_env = model.to_openenv(
obs_fields=[
"physical.disasters.active_disaster_state",
"physical.disasters.wildfire_state",
"physical.disasters.pandemic_risk",
],
act_fields=[
"physical.disasters.active_disaster_state",
],
reward_fn=lambda obs, act, info: -sum(
abs(v.mean()) for v in obs.values()
) + 1.0,
)
# Climate monitor: tracking and coverage
climate_env = model.to_openenv(
obs_fields=[
"physical.climate.global_temp_anomaly",
"physical.climate.carbon_ppm",
],
act_fields=[
"physical.infrastructure.undersea_cable_topology",
],
reward_fn=lambda obs, act, info: -abs(
obs["physical.climate.global_temp_anomaly"].mean()
),
)
Full source: examples/09_robot_envs.py
Installation¶
This adds gymnasium>=0.29 as a dependency. Compatible with both gymnasium and legacy gym.
Design notes¶
Why not OpenAI Gym directly? We use gymnasium (the maintained fork). The WorldModelEnv is a standard gymnasium.Env — it works with any RL framework that supports Gymnasium (Stable Baselines 3, RLlib, CleanRL, TorchRL, etc.).
Why not OpenEnv server/client? The naming .to_openenv() references the idea from OpenEnv of environments as standardized interfaces. Our implementation is a local Gymnasium env (no server needed), but it could be wrapped as an OpenEnv server for distributed training.
Performance: n_denoise_steps controls the speed-quality tradeoff. For RL training, 3-10 steps is usually sufficient. For evaluation, use 50+.
Shared state: Multiple WorldModelEnv instances from the same WorldModel share the canvas. This is intentional for multi-agent scenarios but means single-agent envs should each get their own world model instance (or call reset() between uses).